Geolocation manager
AT2 defines an operational mode used to select the geolocation mode (permanent, start/stop, motion, and so on).
AT3 does not use such a concept. Instead, it is event based: application events trigger the geolocation activities.
The geolocation manager responsibilities are:
- Handling the applications events defined as geolocation triggers and start accordingly the geolocation process.
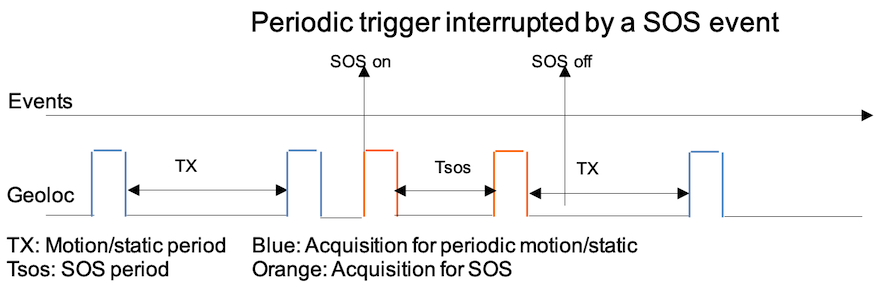
- Supporting the periodic position acquisitions including the SOS mode.
- Performing consecutive position acquisitions if needed (for motion start or stop).
- Managing the priorities between the requests due to the geolocation triggers.
Configuration and behavior
This section is dedicated to the customers and the support. It highlights the geolocation configuration of the manager and associated behavior
Configuration
The configuration is done using the configuration class 1 (geolocation). It defines various periods for periodic (or semi-periodic) acquisitions, counters for motion-start and motion-stop events, event triggers profiles and GBE (Geolocation Basic Engine) profiles.
This paragraph focuses on the triggers and GBE profiles.
The event trigger parameters 0, 1 and 2, associated to the corresponding geolocation profiles 0, 1 and 2 define the list of events for which a geolocation activity should be performed. The geolocation activity will be profiled by the matching profile which define the technologies to use and their sequencing.
An event trigger is a bit-field containing the list of events that should use the same profile. The bit definitions are:
- bit 0: geo_trigger_pod: Geoloc triggered on Position-on-demand via downlink or via button.
- bit 1: geo_trigger_sos: SOS started
- bit 2: geo_trigger_motion_start: Geoloc triggered on motion start
event
- Require the configuration of geo_start_nb_loc and geo_start_stop_loc_period
- bit 3: geo_trigger_motion_stop: Geoloc triggered on motion stop
event
- Require the configuration of geo_stop_nb_loc and geo_start_stop_loc_period
- bit 4: geo_trigger_in_motion: Periodic geoloc while the tracker is
in motion
- Require the configuration of geo_motion_loc_period.
- bit 5: geo_trigger_in_static: Periodic geoloc running while the
tracker is static
- Require the configuration of geo_static_loc_period.
- bit 6: geo_trigger_shock: Geoloc triggered on shock action
- Require the shock detection configured (accelerometer)
- bit 7: geo_trigger_temp_high_threshold: Geoloc triggered on temperature high.
- bit 8: geo_trigger_temp_low_threshold: Geoloc triggered on temperature low.
- bit 9: geo_trigger_geozoning: Geoloc stopped while in monitored area. Enabled when leaving the monitored area.
Event priority groups
Each event belongs to a priority group. This priority is used by the manager to properly schedule (or abort and reschedule) the geolocation. The priority is based on the nature of the event and not on the profile it is defined.
The priority groups are hard-coded and defined as follow:
| Priority | Events |
|---|---|
| 0 (lowest) | Periodic events group (moving, static) |
| 1 | Motion events group (motion-start and motion-end) |
| 2 | User event group (POD, shock detection). Non critical events |
| 3 | System event group (Temperature low/high) |
| 4 | SOS group |
| 5 | Geozoning. |
Notes
- If a given event is defined in two profiles, the geolocation profile used for this event will be the one of the profile having the lowest identifier. This means that a given event can have only one geolocation profile.
Example: Both geoloc_profile0_triggers and geoloc_profile1_triggers have geo_trigger_pod bit set (bit 0), the geolocation profile used for a POD will be geoloc_gbe_profile0_techno.
-
In the rest of the document, we use the term:
- periodic events for in_motion, in_static events and sos events.
- semi-periodic events for motion-start *motion-*stop.
Behavior for cases involving interactions between events
The main objectives of the geolocation manager are:
- To respect the event priority. An event with a higher priority takes precedence regarding the geolocation over a lowest priority.
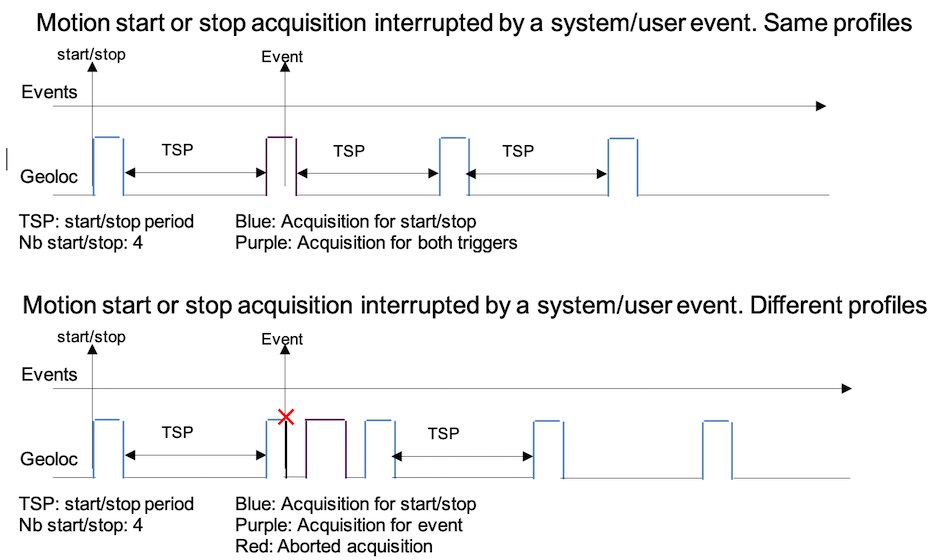
- Avoid having more than necessary geolocation acquisitions: If an event B occurs while an acquisition is in progress for an event A and both have the same profile, don't abort the current acquisition (event if event B has higher priority). Instead, indicate that the geolocation result relates to both triggers.
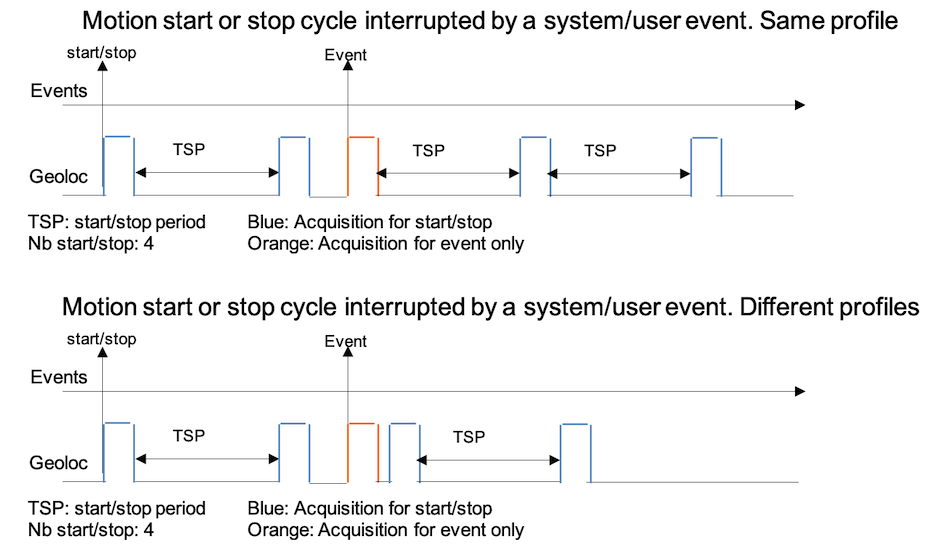
- To manage properly extra-positions for motion-start or motion-end events: When the multiple acquisitions are in progress for a motion event (start or end) and the opposite event occurs the multiple acquisition stops for the previous event (and may restart for the opposite event if configured for).
- To avoid having no geolocation when periodic triggers are in use (this case may occur when the tracker continuously moves and stops within the configured periods).
- Since events can have different geolocation profiles, the trigger events are not lost (unless an opposite event occur).
- When SOS is active for the geolocation point of view, all other triggers except the geozoning do not apply
- When the geozoning is active [(NOT YET SUPPORTED)] :
- Inside the monitored area, the geolocation is disabled.
- Outside the monitored area, the geolocation is enabled.
SOS management
The SOS geolocation is not active if the geozoning (NOT YET SUPPORTED) indicates that we are in a monitored area. In this case, the SOS is managed directly by the geozoning.
When we are not in a geozoning monitored area and the SOS start event is received, all triggers are reset except the SOS. This means that the current triggers are removed and subsequent events (except geozoning) are discarded.
Once leaving the SOS, only the periodic triggers are reactivated.
Periodic and semi-periodic triggers management
The periodic and semi-periodic events generate acquisitions spaced over time. This section discusses about the timing management for such triggers except the SOS. We remind that the SOS cannot be interrupted since it has the highest priority.
To properly space over time the geolocation activities, the geolocation manager uses a timer for which the timeout can be dynamically calculated on certain circumstances.
The periodic and semi-periodic triggers are generated from the accelerometer events :
- A motion-start event from the accelerometer will setup the motion_start and the in_motion triggers if they are configured. It also clears the in_static triggers if it was set. If the motion-stop trigger was previously set and an acquisition is in progress, the motion-stop trigger is not cleared unless a different profile belongs to each trigger. Once the geolocation completes, the motion-stop trigger is cleared and the event is reported with both flags stop and start. If the start trigger has a different profile, the ongoing acquisition aborts and is restarted with the new profile.
- A motion-stop event from the accelerometer will setup the motion_stop and the in_static triggers if they are configured. It also clears the in_motion triggers if it was set. If the motion-start trigger was previously set and an acquisition is in progress, the motion-start trigger is not cleared unless a different profile belongs to each trigger. Once the geolocation completes, the motion-start trigger is removed.
- In SOS mode, from SOS start and SOS stop events
Timing adjustments
A timing adjustment may be needed when the geolocation manager is processing a given periodic/semi-periodic trigger and another periodic/semi-periodic trigger is being activated.
The manager uses the event priority to know whether the timing should be adapted. The processing rules are:
- If the new trigger has a higher priority than the current one, the timing is not adapted and the geolocation starts immediately for the new event.
- If the new trigger has a lower or equal priority than the current one, the timing is adapted as if the previous acquisition was done for the new event, i.e. as soon as the acquisition completes it will be used for the new trigger as well..
Example 1
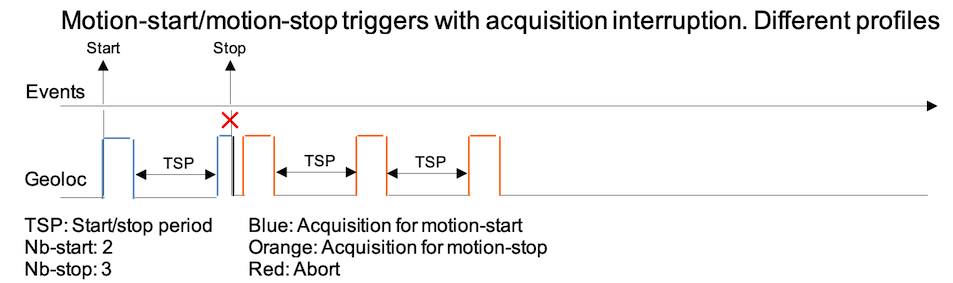
The tracker is configured for motion_start and motion_stop triggers. While waiting for the next acquisition related to a motion_start trigger (assuming we have multiple acquisitions on start event),, we get a motion-end event. The timer is recalculated to coincide with the next motion start acquisition:
timeout = geoloc_start_stop_period -- elapsed_timer_time.
This means that the total time elapsed between the two last geolocation acquisitions remains geoloc_start_stop_period.
Example 2:
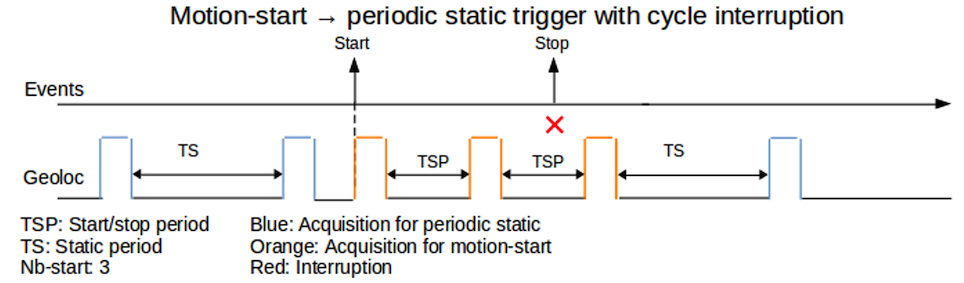
The tracker is configured for in_static and motion_start triggers. The tracker is static, and the periodic acquisition is in progress. While waiting for the next geolocation acquisition, a motion-start event is received. The geolocation acquisition for the motion-start event starts immediately.
While waiting for the next acquisition due to the motion-start event a motion-end system event (not configured as trigger) occurs. The next periodic static geolocation acquisition will be adjusted to start from end of previous motion start acquisition:
timeout = geoloc_static_period -- elapsed_timer_time.
This means that the total time elapsed between the two last geolocations acquisitions is geoloc_static_period .
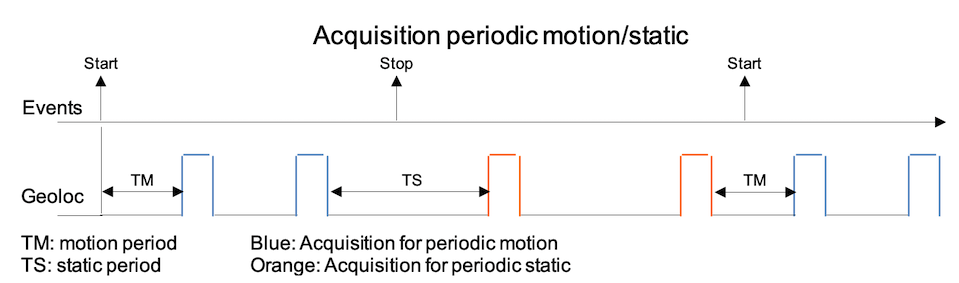
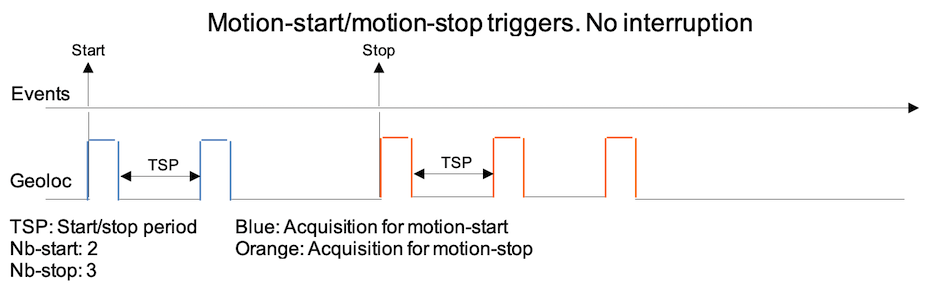
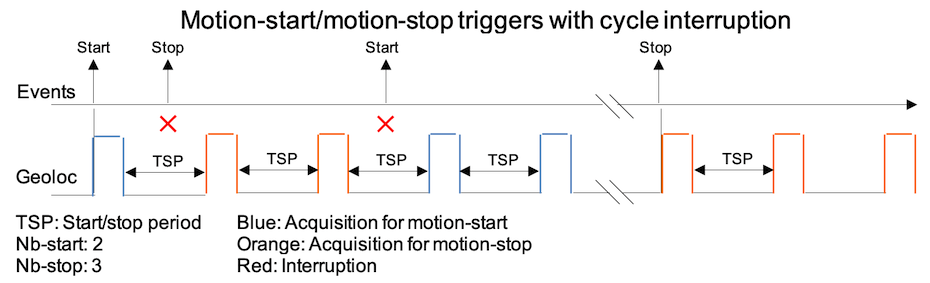
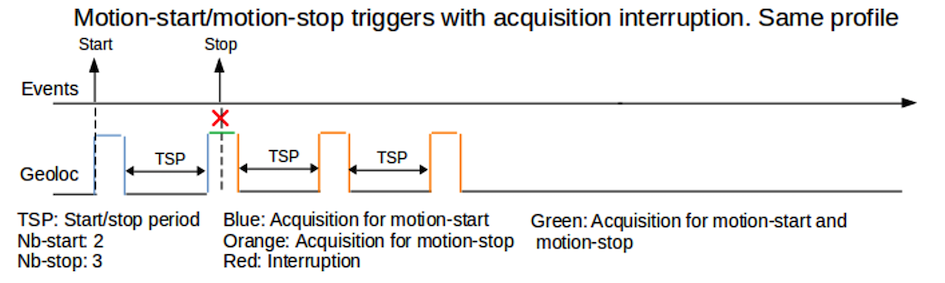
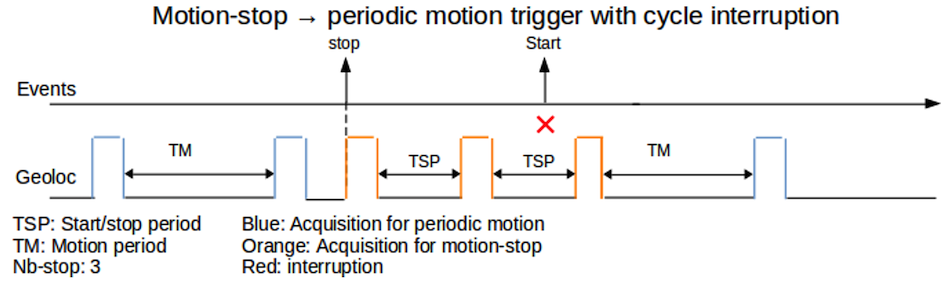
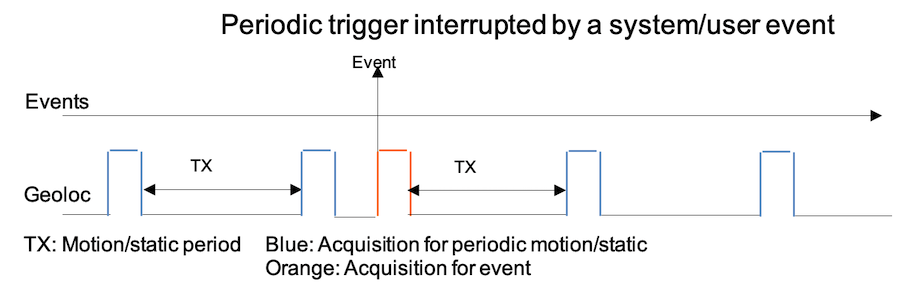
The following chronograms highlights the time spacing between the geolocation acquisitions for periodic or semi-periodic triggers
Geolocation chronograms
Geolocation Basic Engine (GBE)
The GBE is a basic geolocation machine, working in fallback / forced mode. It replicates and extends the geolocation modes and the BLE scan collections available in AT2.
Technology scheduling
The GBE supports several geolocation profiles. Each profile is defined by a a mask and an array of bytes:
- The mask is a bit field indicating the application events belonging to this profile.
- The array of byte provides the list of the technologies.
Each byte in the array defines a geolocation technology. The GBE schedules the technologies in the order of the byte array. This means that the technology defined at the first array index is always done and is scheduled first. Then the engine schedules the second technology (if needed) defined by the next index in the array. The process continues until the last technology is done.
Note that the values in the array define the technology to use as well an action indicating that the technology must be either always scheduled or scheduled only if the previous technologies failed to acquire a position .
In order to schedule a BLE scan collection, this technology must be configured with "always done" flag.
Also note that it is strongly recommended to have the "always done" technologies configured as the last technologies.
The GBE supports up to 3 profiles. These profiles are prioritized based on their identifier. The profile 1 has top priority, the second has medium priority and the last has the lowest priority. These priorities are used to know whether a running geolocation process should be interrupted.
For example, the button 1 press is associated to geolocation profile 1. The accelerometer events are associated to the profile 2. Suppose that the geolocation process is running due to an accelerometer event (priority 2) and the user press the button 1. At this stage, the geolocation process is canceled and restarted with profile 1. Suppose now that the geolocation process is running due to a button 1 press and an accelerometer event is received. The geolocation process won't be stopped and the geolocation request due to the accelerometer event will be discarded.
Configuration
A geolocation profile is defined by two parameters:
- gbe_profileX_triggers(X=1,2,3): 32 bits integer defining the bitmap list of the triggers.
- gbe_profileX_techno (X=1,2,3): Byte array containing the list of technology to schedule.
The bytes of the gbe_profileX_techno parameters are coded as follow:
- Bit 7: Action
- Bits [6..0]: Technology
Available technologies are:
| Identifier | Technology |
|---|---|
| 0 | None |
| 1 | LR11xx_A_GNSS |
| 2 | WIFI |
| 3 | BLE scan 1 |
| 4 | BLE scan 2 |
| 5 | aided_GNSS |
| 6 | GNSS |
Available actions are:
| Identifier | Action |
|---|---|
| 0 | Skip on success |
| 1 | always_done |
It is clear that the first technology is always performed. So, it does not require the always_done action.
Scheduling rules
The following scheduling rules apply (refer to the chronograms of section chronograms for details and examples):
- The geolocation triggers inside a profile are non-exclusive. When the geolocation is already running due to a given trigger inside a profile and another trigger in the same profile is solicited, the geolocation is not restarted. Instead, the geoloc stores the two triggers. These triggers will be reported (as a bitmap) in the application position uplink.
- If the geoloc timer is running and a trigger is solicited, the timer
is stopped and the geoloc is started. Once done, the geoloc will
check if the timer need to be restarted:
- If we were in position acquisition due to nb_start or nb_stop, the timer is restarted with geo_start_stop_period if the number of expected positions is not reached, otherwise moves to step #2.
- Tracker is in motion and geo_trigger_in_motion bit set, the timer is restarted with geo_motion_loc_period.
- Tracker is static and geo_trigger_in_static bit set, the timer is restarted with geo_static_loc_period.
- Tracker is in the geozoning monitored area and geo_trigger_geozoning_monitor bit set, the timer is restarted with geo_static_loc_period If static or geo_motion_loc_period if moving.
Technologies scheduling examples
The examples in this section use a single profile.
Single technology
In this example we use only the MT3333 GNSS technology.
gbe_profile1_techno[0] = 6 MT3333 GNSS
gbe_profile1_techno[1] = 0 None
gbe_profile1_techno[2] = 0 None
gbe_profile1_techno[3] = 0 None
gbe_profile1_techno[4] = 0 None
Dual technologies in fallback mode
In this example we do WIFI fallback MT3333 aided GNSS: In case of WIFI success, the GNSS is not scheduled. In case of WIFI failure, the GNSS is scheduled.
gbe_profile1_techno[0] = 2 WIFI
gbe_profile1_techno[1] = 5 MT3333 A-GNSS
gbe_profile1_techno[2] = 0 None
gbe_profile1_techno[3] = 0 None
gbe_profile1_techno[4] = 0 None
Dual technologies in fallback and single collection
In this example we do LR1100 aided GNSS fallback MT3333 aided GNSS: In case of LR1110 success, the MT3333 A-GNSS is not scheduled, otherwise it is. The BLE collection is always scheduled.
gbe_profile1_techno[0] = 1 LR1110 A-GNSS
gbe_profile1_techno[1] = 5 MT3333 A-GNSS
gbe_profile1_techno[2] = 0x83 BLE scan1 + Always_done action
gbe_profile1_techno[3] = 0 None
gbe_profile1_techno[4] = 0 None
Dual technologies in fallback and dual collections
In this example we do LR1100 aided GNSS fallback MT3333 aided GNSS: In case of LR1110 success, the MT3333 A-GNSS is not schedule, otherwise it is. The BLE and WIFI collections are always done.
gbe_profile1_techno[0] = 1 LR1110 A-GNSS
gbe_profile1_techno[1] = 5 MT3333 A-GNSS
gbe_profile1_techno[2] = 0x83 BLE scan 1+ always_done action
gbe_profile1_techno[3] = 0x82 WIFI + always_done action
gbe_profile1_techno[4] = 0 None
Single technology and three collections
In this example we do MT3333 GNSS. Then we do collections for MT3333 aided GNSS, WIFI and BLE.
gbe_profile1_techno[0] = 6 MT3333 GNSS
gbe_profile1_techno[1] = 0x81 LR1110 A-GNSS
gbe_profile1_techno[2] = 0x83 BLE scan1 + always_done action
gbe_profile1_techno[3] = 0x82 WIFI + always_done action
gbe_profile1_techno[4] = 0 None
Three technologies in fallback single collection
In this example we do LR11110 A-GNSS fallback MT3333 A-GNSS fallback WIFI. Then we do a BLE collection.
gbe_profile1_techno[0] = 1 LR1110 A-GNSS
gbe_profile1_techno[1] = 5 MT3333 A-GNSS
gbe_profile1_techno[2] = 2 WIFI
gbe_profile1_techno[3] = 0x83 BLE scan1 + always_done action
gbe_profile1_techno[4] = 0 None
Four technologies in fallback no collection
In this example we do BLE fallback WIFI fallback LR11110 A-GNSS fallback MT3333 A-GNSS.
gbe_profile1_techno[0 = 3 BLE scan1
gbe_profile1_techno[1] = 2 WIFI
gbe_profile1_techno[2] = 1 LR1110 A-GNSS
gbe_profile1_techno[3] = 6 MT3333 A-GNSS
gbe_profile1_techno[4] = 0 None
Geolocation reporting
The reporting of the geolocation depends on what has been configured. The sending rules are the following:
- If only one technology is present in the list, the reporting is always done regardless the status (success/failure).
- A skipped or aborted geolocation technology is never reported.
- The result of an always done technology is always reported even if the technology fails.
- The first scheduled technology of the list is always performed even
if the always done flag is not set. However the reporting of
this technology is done as follow:
- If the always done flag is reset and we are in multi-technology, the reporting is not done.
- f the always done flag is set and we are in multi-technology, the reporting is not done.
- Some cases in multi-technology mode where mixed state of the always done flag are used, the failed technologies in fallback mode will not be reported.
Example 1
Technologies used: BLE fallback WIFI fallback GNSS
gbe_profile1_techno = {03,02,06,00,00,00}
On BLE success: only BLE is reported
On BLE failure and WIFI success: only WIFI is reported
On BLE and WIFI failure: GNSS (success or failure) only is reported
Example 2
Technologies used: BLE fallback WIFI. GNSS always-done
gbe_profile1_techno = {03, 02, 86,00,00,00}
On BLE success: BLE and GNSS (success or failure) are reported
On BLE failure and WIFI success: WIFI and GNSS (success or failure) are reported
On BLE and WIFI failure: Only GNSS (success or failure) is reported
Example 3
Technologies used: BLE fallback WIFI. WIFI and GNSS always-done
gbe_profile1_techno = {03,82,86,00,00,00}
On BLE success: BLE, WIFI (success or failure) and GNSS (success or failure) are reported
On BLE failure: WIFI (success or failure) and GNSS (success or failure) are reported
Example 4
Technologies used: BLE always done. WIFI fallback GNSS.
gbe_profile1_techno = {83,02,06,00,00,00}
On BLE success: GNSS only is reported.
On BLE failure and WIFI success, BLE and WIFI are reported.
On BLE and WIFI failure, GNSS success: BLE and GNSS are reported.
On BLE and WIFI and GNSS failure:BLE only is reported.
Example 5
Technologies used: BLE always done. WIFI fallback GNSS. GNSS always done
gbe_profile1_techno = {83,02,86,00,00,00}
On BLE success, BLE and GNSS are reported
On BLE failure and WIFI success: BLE, WIFI and GNSS are reported
On BLE and WIFI failure: BLE and GNSS reported
On BLE and WIFI and GNSS failure: BLE and GNSS are reported.
Example 6
Technologies used: BLE always done. WIFI always done. GNSS fallback
gbe_profile1_techno = {83,82,06,00,00,00}
On GNSS success, WIFI success or failure, GNSS and WIFI are reported
On GNSS failure, WIFI failure, BLE success. GNSS,WIFI and BLE are reported
On GNSS failure, WIFI failure, BLE failure. GNSS and WIFI are reported
Example 7
Technologies used: BLE always done. WIFI always done. GNSS always done
gbe_profile1_techno = {83,82,86,00,00,00}
Regardless the success/failure status of each techno, GNSS, WIFI and BLE are reported.
GNSS hold-on mode
The GNSS hold-on mode is a special mode applicable only on the MT3333 device. It allows to maintain the main power of the device while it is not actually used for an ongoing location resolution. The motivation is to prepare for a future location resolution event in order to maximize the accuracy of this upcoming resolution, as a GNSS chip position accuracy typically improves over time after the chip is initially powered.
Maintaining the power on of the component, makes future GNSS fixes very quickly and allows a very good position accuracy.
Notes:
- The GNSS Hold-on mode is power consuming. It is advised to use only if an accuracy of 5m or better is required, or if the period of the position acquisitions is less than about 1mn. An acquisition after chip restart will typically require 20 to 30s, versus only 1s in hold-on mode, and also the tracking mode of the GNSS typically is more power efficient than the initial acquisition, therefore the overlal power budget of the hold-on mode is comparable or favorable for acquisition periods below 1mn.
- In general we advise using this mode only for rechargeable devices. However there are exceptions, for example to track vehicles on a factory or new vehicle storage parking (very infrequent movements, which last only a few minutes), it will be very beneficial to use the hold-on mode during motion as the stop position will be very accurate and the additional energy cost is negligible.
- This mode cannot be used in conjunction to the GNSS part of the LR1110. This means that any trigger pointing to a profile having the lr1110_agnss configured will disable automatically this mode. This restriction comes from the fact that the two GNSS components share the same antenna.
Configuration
This mode is configured via the parameters:
-
geoloc_gnss_hold_on_mode: Configure the behavior as well the triggers starting this feature. Refer hereafter for the acceptable values.
-
geoloc_gnss_hold_on_timeout: Provide the maximum duration for which the hold-on mode is kept. Once the period elapsed and in absence of events matching the feature triggers, the hold-on mode is stopped and the normal process (standby then power off) resumes. Hold-on mode is deactivated if this parameter is set to 0.
The values that the GNSS hold-on mode can take are provided by the following table.
| Value | Mode | Comment |
|---|---|---|
| 0 | None | Hold-on mode deactivated |
| 1 | Always | Hold-on mode always activated. |
| 2 | Techno used | Hold-on mode activated only when the GNSS technology is actually used. |
| 3 | Moving | Hold-on mode activated only if the tracker is in motion |
| 4 | Static | Hold-on mode activated only if the tracker is static |
| 5 | Moving and used | Hold-on mode activated only when the GNSS technology is actually used and the tracker is in motion. |
Note
The geoloc_gnss_hold_on_timeout is applicable of all modes except None (value 0).
GNSS hold-on feature behavior
When hold-on mode is activated, the geolocation manager instructs the GNSS to remain powered, even though it does not need an immediate fix. This lets the GNSS component to continue to refine its fix. When the geolocation manager needs a new GNSS fix (via the GBE), the fix is immediately ready and usually has a very good accuracy.
It is important to understand that when a hold-on feature trigger occurs the geolocation manager will indicate to the GNSS component that it should keep its power on once it finishes its acquisition. So the first acquired position may be not as accurate as expected since prior the acquisition the component was either sleeping or off.
There are two different triggers related to this feature:
- Motion start/stop: Events indicating whether the tracker is moving or static (used by the mode 3, 4 and 5).
- Technology used. If the GNSS is actually used (meaning GNSS technology not skipped) the hold-mode is activated. This means that if the GNSS is used in fallback mode and another technology is successful, then the hold mode is left (mode 4 and 5).
Note that when the hold-mode is configured to Always, it is advised to also configure geoloc_gnss_hold_on_timeout to limit the power consumption.
Let's take an example to clarify the feature behavior in techno-used mode. Suppose that the GBE has a single profile, which configures the first technology being BLE and the second as GNSS in fallback mode.
In the case where the BLE technology successes, the GNSS hold-on mode is deactivated. It remains inactive until the BLE technology fails. At this stage, the GNSS technology will be actually used and the GNSS hold-mode will be activated. It will remain activated until the BLE technology fails to acquire a position. On BLE scan success, the GNSS hold mode is left.
Geolocation vs geozoning management
The geozoning feature defines a notion of monitored area, which is defined by BLE beacons matching certain filters. Entering the monitored area means that any type of BLE beacons except exit has been detected. Leaving the monitored area means that either a exit beacon has been detected or a a configured period of time without visibility of any BLE beacon has been reached.
While inside the monitored area, the geolocation manager ignores all triggers other than the periodic triggers and the SOS (if they have been activated).
Once leaving the monitored area, all triggers are re-enabled.
It also means that the SOS processing is preserved regardless the type of area (monitored or not).