Geolocation technology description
Position message scheduling
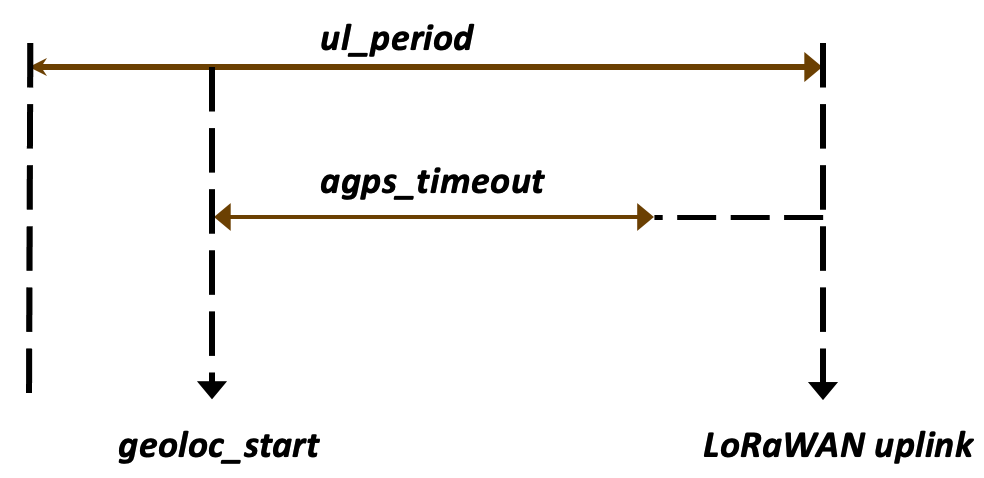
The position message reporting frequency is based on the ul_period parameter. However, the first message can be postponed due to the position acquisition delay. This delay depends on the geolocation strategy used. Nonetheless, the tracker triggers an uplink message each time a new geolocation cycle starts. This message depends on the operating mode used and the config_flags configuration.
After the transmission of this initial message, a first position is transmitted when its calculation is done:
- GPS, WIFI-GPS or BLE-GPS: the max delay to send the position is the gps_timeout parameter value.
- LPGPS, BLE-LPGPS or WIFI-LPGPS: the max delay to send the position is the agps_timeout parameter.
- WIFI only: the max delay to send the position is 10 seconds.
- BLE only: the max delay to send the position is given by the ble_beacon_timeout parameter increased by 2 seconds.
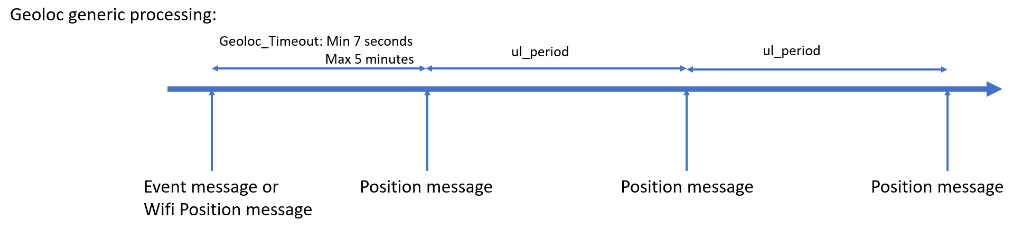
After the first position is obtained, the geolocation timing uplinks are scheduled using the ul_period parameter (or sos_period parameter in SOS).
Depending on the config_flags, the event message can be:
- A geoloc start event message
- A motion start event message
- A motion end event message
Refer to the section Event message for more details.
GPS
The tracker tries to acquire a position within gps_timeout. In the case of SOS, the timeout is reduced to sos_period if the gps_timeout is greater than the sos_period value.
Find below the flowchart describing the working of the gps module:
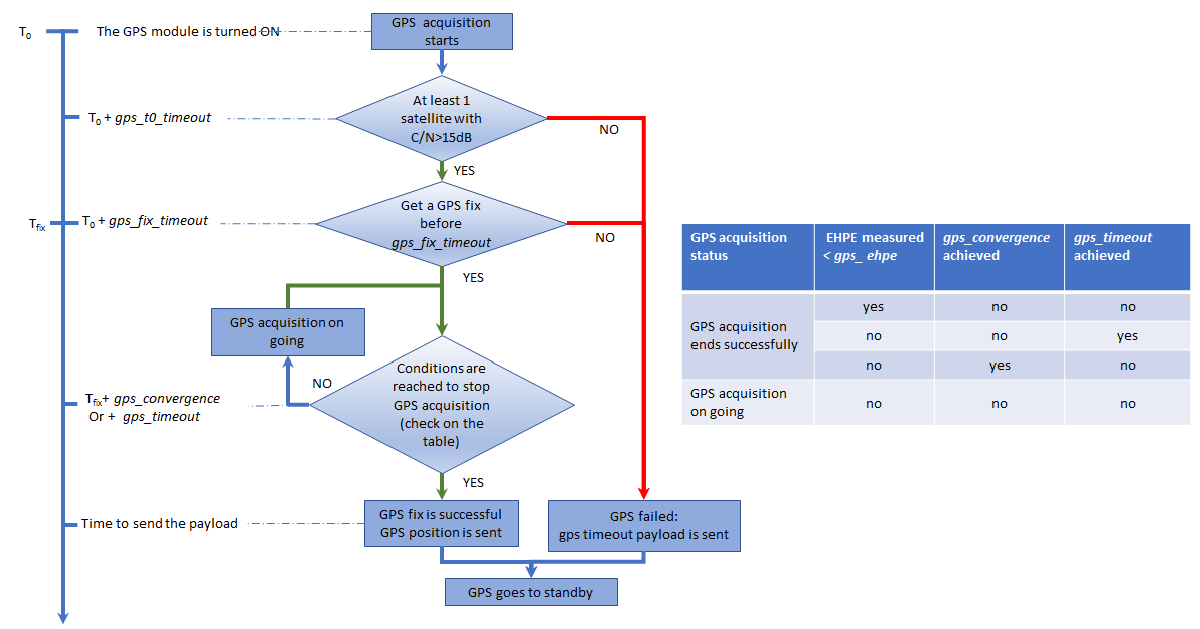
For power consumption purpose, a predictive algorithm has been put in place: The GPS is stopped as soon as possible if it has no chance to make a fix (e.g. indoor location without a clear sky view). The following parameters are used to customize this algorithm:
- gps_t0_timeout: When expired at least 1 satellite with C/N>15dB must be detected to continue the GPS acquisition when the tracker is static
- gps_t0_timeout_motion: When expired at least 1 satellite with C/N>15dB must be detected to continue the GPS acquisition when the tracker is moving
- gps_fix_timeout: when expired a GPS fix must be obtained detected to pursue the processing
- gps_timeout: when expired the GPS acquisition is stopped
To complete a position, the GPS module expects one of the following conditions to be achieved.
- The gps_convergence timeout in seconds (time let to the GPS module to compute a more precise position) expires when the tracker is static.
- The gps_convergence_motion timeout in seconds (time let to the GPS module to compute a more precise position) expires when the tracker is moving.
- The gps_ehpe value is below the configured value. EHPE (Estimated Horizontal Position Error) is provided by the GPS component and is expressed in meters when the tracker is static.
- The gps_ehpe_motion value is below the configured value. EHPE (Estimated Horizontal Position Error) is provided by the GPS component and is expressed in meters when the tracker is moving.
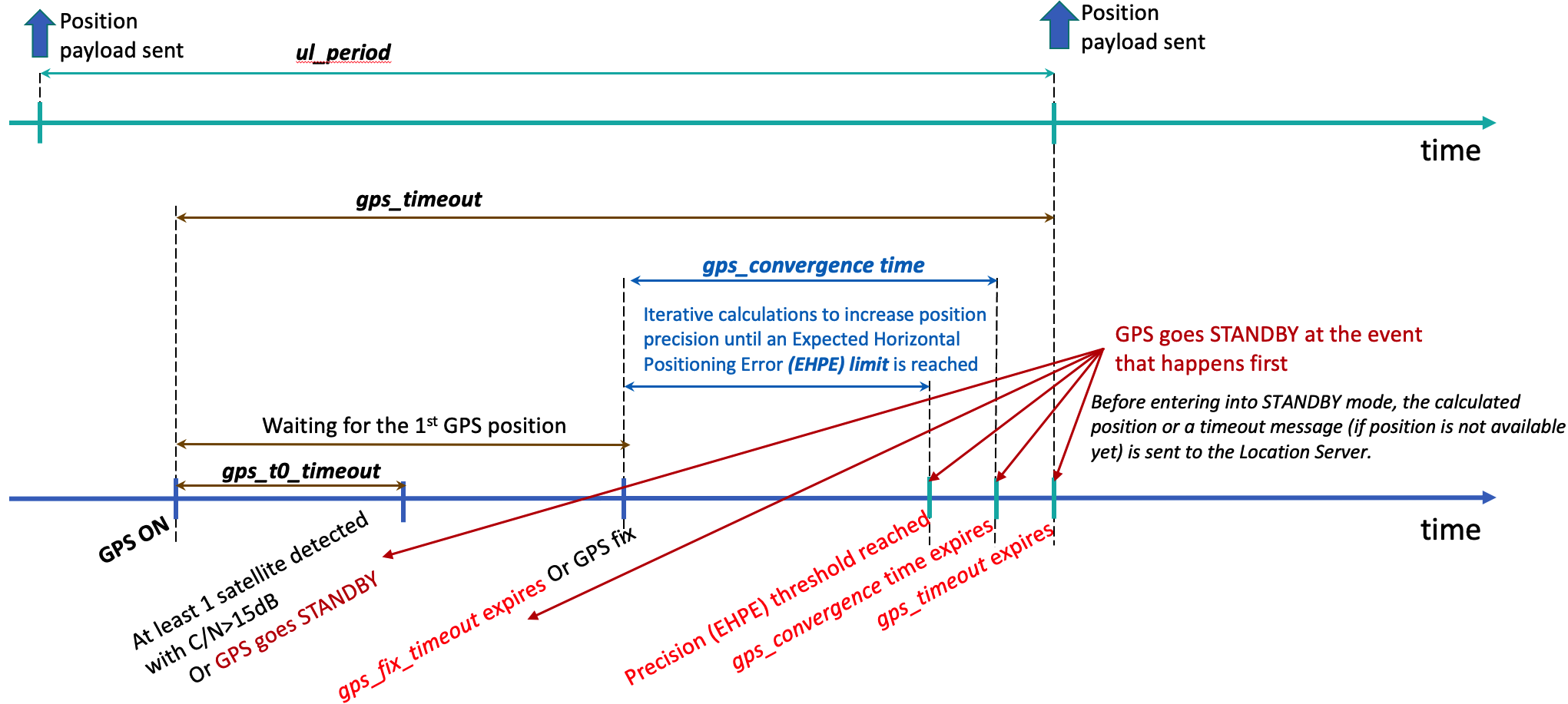
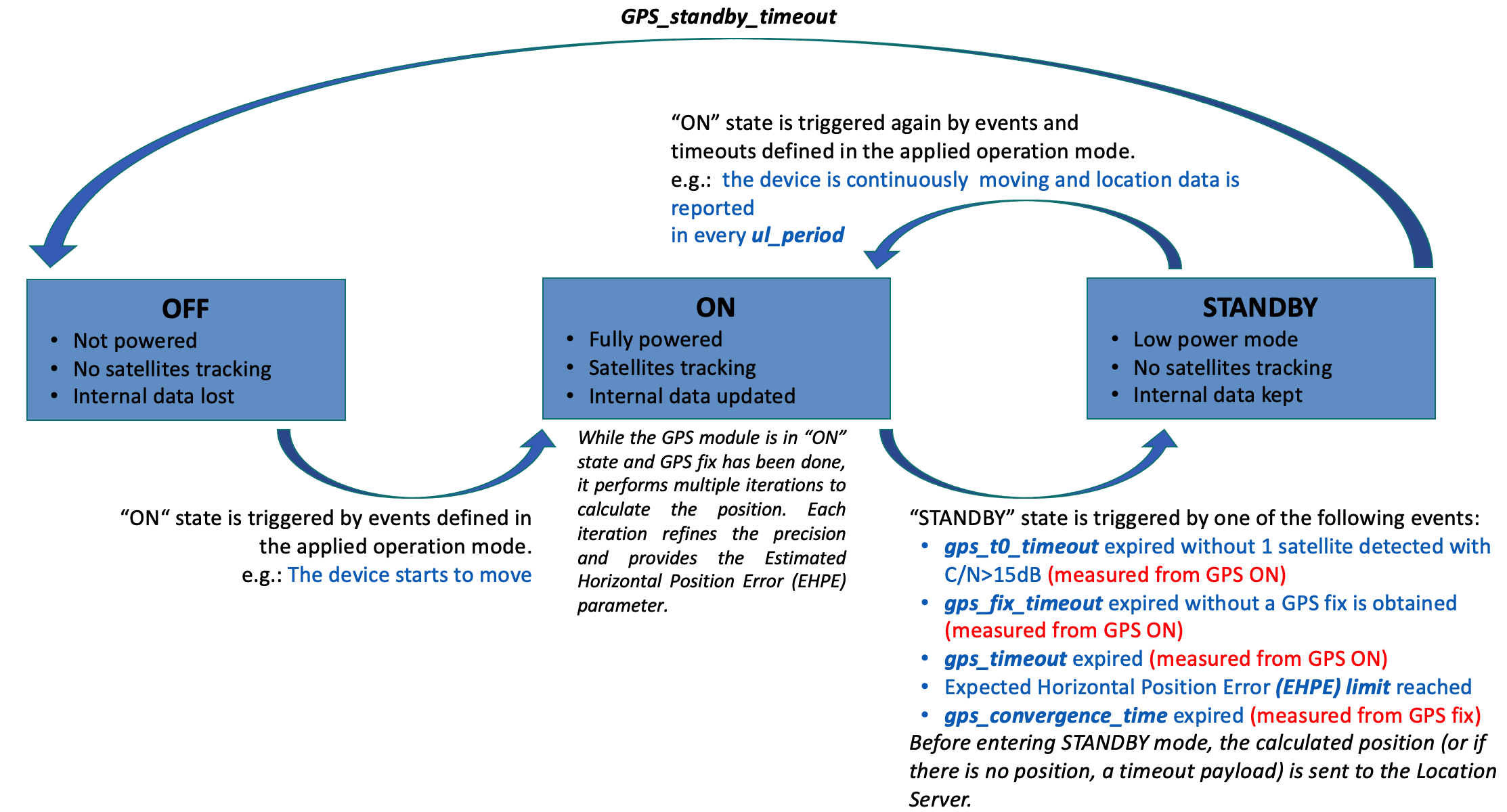
Once completed the position is reported via LoRaWAN™ and the GPS component switches to the standby state.
Once the gps_standby_timeout delay expires, the GPS component is powered off. This leads to a loss of all data and ephemeris.
In the case where the GPS module didn't succeed, a GPS timeout message is sent instead of a GPS position message. The timeout cause is given in the payload. (See GPS timeout payload for more details about this message)
GPS state diagram
In the case where the gps_timeout value is greater than the ul_period, the used GPS timeout will be ul_period for position sent for the main operating mode (permanent, motion or start end).
Low power GPS (LPGPS)
With this technology, the device sends the data given by the GPS module before the expiration of agps_timeout and the positions calculation are done by ThingPark X Location Engine.
In order to reduce power consumption on the tracker, a predictive algorithm has been put in place: The GPS is stopped as soon as possible if it has no chance to make a fix or to acquire enough data for LPGPS calculation (e.g. indoor location without a clear sky view). The following parameters are used to customize this algorithm:
- gps_t0_timeout: When expired at least 1 satellite with C/N>15dB must be detected to continue the GPS acquisition when the tracker is static
- gps_t0_timeout_motion: When expired at least 1 satellite with C/N>15dB must be detected to continue the GPS acquisition when the tracker is moving
- gps_fix_timeout: when expired if there is no GPS fix, the tracker switches back to LPGPS acquisition
- agps_timeout: when expired the LPGPS or GPS acquisition is stopped
If the GPS component fails to provide enough data to the server, the tracker sends a LPGPS timeout uplink instead of a usual message.
If a GPS position is obtained before having sufficient data for LPGPS calculation, the GPS position is sent if one of the following conditions is achieved before agps_timeout expired.
- The gps_convergence timeout in seconds (time let to the GPS module to compute a more precise position) expires if the tracker is static.
- The gps_convergence_motion timeout in seconds (time let to the GPS module to compute a more precise position) expires if the tracker is moving.
- The gps_ehpe value is below the configured value. EHPE (Estimated Horizontal Position Error) is provided by the GPS component and is expressed in meters if the tracker is static.
- The gps_ehpe_motion value is below the configured value. EHPE (Estimated Horizontal Position Error) is provided by the GPS component and is expressed in meters if the tracker is moving.
In the case where the agps_timeout value is greater than the ul_period, the actual GPS timeout will be ul_period for position sent for the main operating mode (permanent, motion or start end).
The figure below details the functioning of the LPGPS
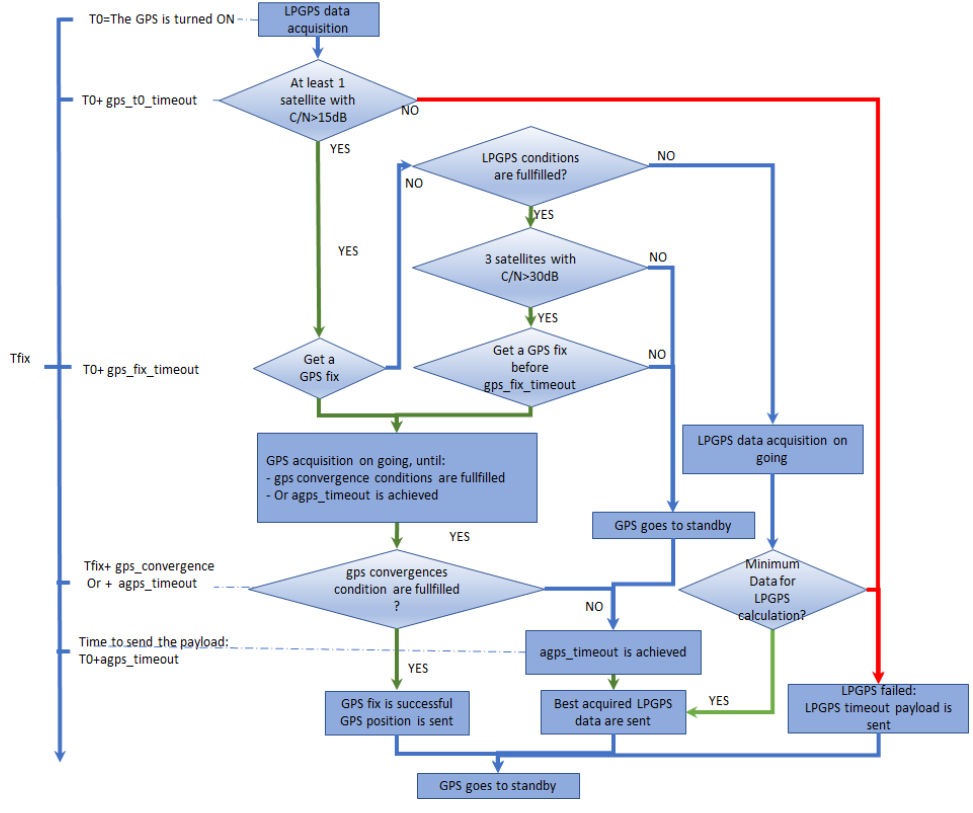
Refer to the dedicated application note AN-016_GPS_LPGPS for more details.
WiFi
Since a WIFI scan is always done within three seconds, there is no timeout parameter. Once the scan is done, the BSSIDs along with associated RSSI are sent via LoRaWAN™ the position calculation is done by the ThingPark X Location Engine in the geolocation backend.
The number of BSSID max that can be reported in a WIFI payload is:
- 4 If the bit 12 of the config_flags parameter is reset
- 12 If the bit 12 of the config_flags parameter is set
In a multi technology geolocation, WIFI scan results are only sent in the uplink if the number of BSSIDs are greater than or equals to 3. If there are less than 3 BSSIDs found, then this triggers a technology switch (move to GPS or LPGPS depending on the value of geoloc_sensor or geoloc_method).
- A filtering system is applied when the WIFI fingerprinting is not used (bit 12 of the config_flags parameter reset). Multicast and locally administrated BSSID are removed. A locally administered MAC address is an address generated by the WIFI access point. This MAC address is not guaranteed to be unique for locally administered MAC address. Conversely, a public MAC address is a registered address against the IEEE and is unique around the world. Usually, a WIFI access point advertises both locally administered and public MAC addresses. A multicast address is usually used by the WIFI access point to send multicast IP packet (You can find more data about these BSSID here).
- If the user does not provide their own Wifi API key is provided, WIFI position resolution within ThingPark location backend will be throttled when the tracker is static. Newer WIFI positions upink will not be solved since previous position remains correct unless movement is detected.
In the table below you can see the discarded BSSID:
| BSSID | Is BSSID discarded?(yes/no) | |
|---|---|---|
| Unicast (individual) / Universally administered | x0-xx-xx-xx-xx-xx | No |
| x4-xx-xx-xx-xx-xx | No | |
| x8-xx-xx-xx-xx-xx | No | |
| xC-xx-xx-xx-xx-xx | No | |
| Multicast (group) / Universally administered | x1-xx-xx-xx-xx-xx | Yes |
| x5-xx-xx-xx-xx-xx | Yes | |
| x9-xx-xx-xx-xx-xx | Yes | |
| xD-xx-xx-xx-xx-xx | Yes | |
| Unicast (individual) / Locally administered | x2-xx-xx-xx-xx-xx | Yes |
| x6-xx-xx-xx-xx-xx | Yes | |
| xA-xx-xx-xx-xx-xx | Yes | |
| xE-xx-xx-xx-xx-xx | Yes | |
| Multicast (group) / Locally administered | x3-xx-xx-xx-xx-xx | Yes |
| x7-xx-xx-xx-xx-xx | Yes | |
| xB-xx-xx-xx-xx-xx | Yes | |
| xF-xx-xx-xx-xx-xx | Yes |
BLE beacon scan
This technology scans the BLE beacons and reports them via LoRaWAN™. The configuration is based on three parameters:
- ble_beacon_timeout: BLE scan duration.
- ble_beacon_cnt: Maximum number of beacons to be reported in the position message.
- ble_rssi_filter: BLE RSSI condition to trigger a geolocation switch. Applicable only with BLE-GPS and BLE-LPGPS geolocation mode. The switch to the GPS technology occurs if there is no beacon with a RSSI greater than the configured value.
In addition, some filtering can be added using the following parameters:
- position_ble_filter_type: beacon type to be reported.
- position_ble_filter_main_1: First part of the main BLE filter value (depends on the type chosen)
- position_ble_filter_main_2: Second part of main BLE filter value (depends on the type chosen)
- position_ble_filter_sec_value: Secondary BLE filter value (depends on the type chosen)
- position_ble_filter_sec_mask: Secondary BLE filter mask (depends on the type chosen)
- position_ble_filter_report_type:Type of data to be reported in the payloads.
- Refer to the dedicated application note AN-006_Position_BLE_filtering for more details.
- We highly recommend to always use filtering to avoid detection of beacons by the tracker which are not part of IoT deployment
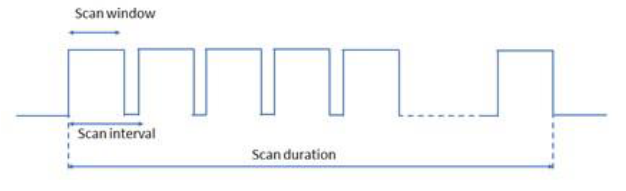
The figure below describes the timing of a scan. Scan duration=minimum (ul_period, ble_beacon_timeout) Scan window=120 milliseconds Scan interval=130 milliseconds
- In a multi-technology geolocation, the tracker switches to another geolocation technology if no beacons are detected or if there is no beacon with a RSSI greater than the ble_rssi_filter value.
- In the case where the technology used is BLE only and the BLE component fails to detect BLE beacons, the device reports a BLE failure message.
Configuration example
ble_beacon_cnt = 0x04: The maximum number of beacons sent in LoRaWAN™ position messages is 4
- BLE Beacons must be at least compliant with:
- iBeacon (Apple)
- Eddystone (Google)
- Altbeacon
- Once the scan is done, the BLE beacon data, along with associated RSSI are sent via LoRaWAN™ the position calculation is done by the ThingPark X Location Engine in the geolocation backend.
Multi-technologies
These technologies use two different components in the same geolocation cycle:
- WIFI-GPS: Try a WIFI scan, then switch to the GPS in case of failure.
- WIFI-LPGPS: Try a WIFI scan, then switch to the LPGPS in case of failure.
- BLE-GPS: Try a BLE scan, then switch to the GPS in case of failure.
- BLE-LPGPS: Try a BLE scan, then switch to the LPGPS in case of failure.
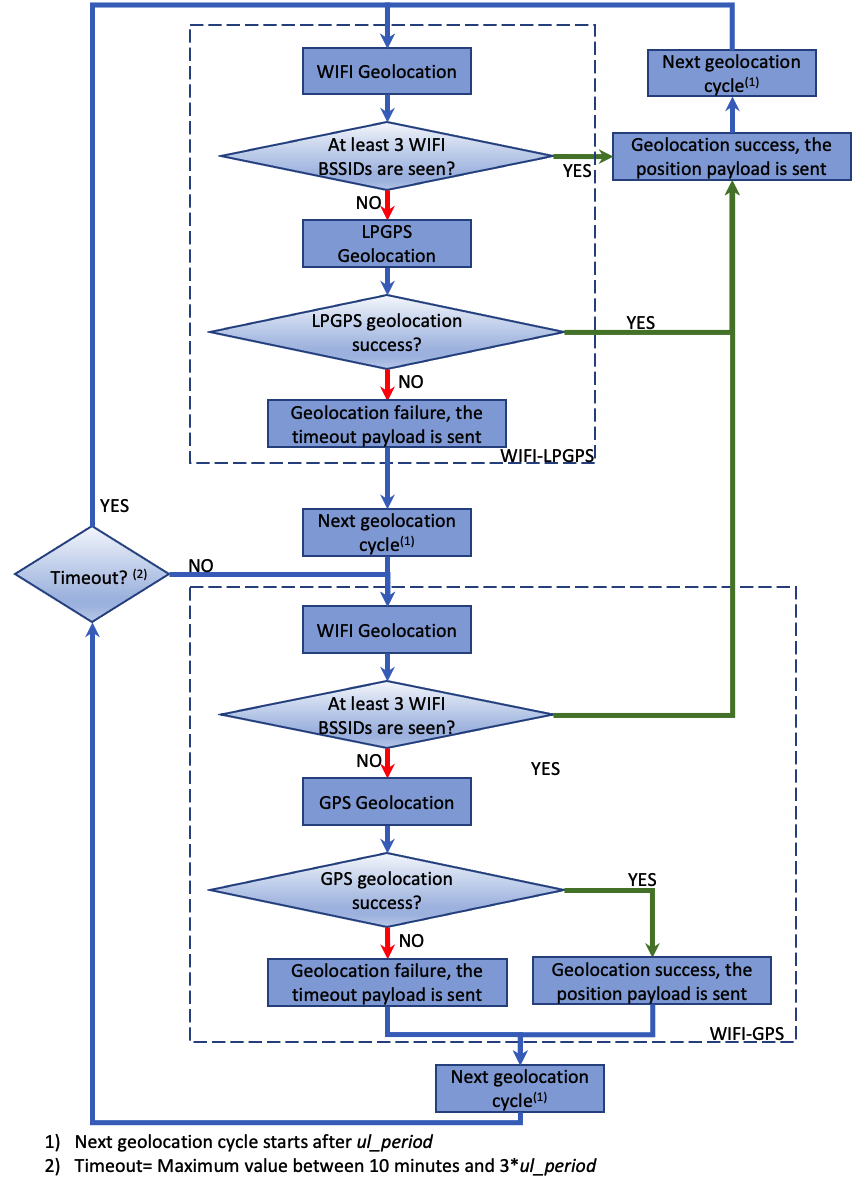
WIFI-GPS and WIFI-LPGPS
A WIFI scan result is considered as successful if at least three BSSID are present in the scan. In this case a WIFI position message is sent via LoRaWAN™. Otherwise, the tracker tries immediately the next geolocation technology (GPS or LPGPS), in the same geolocation cycle.
The picture below shows the timing diagram.
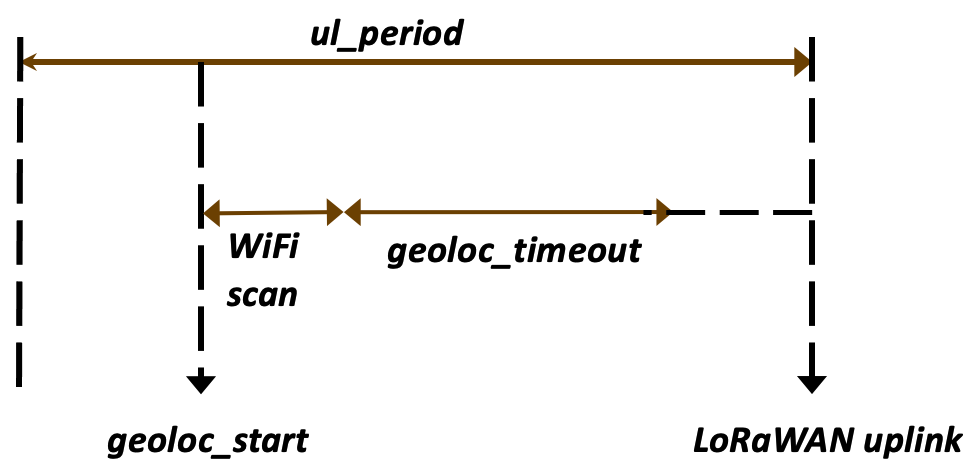
The actual geolocation timeout can be determined using the formula:
- Geoloc_timeout =gps_timeout or agps_timeout depending on the technology used.
If geoloc_timeout + WIFI_time (5 seconds) + switching techno time (3 seconds) is higher than ul_period, geoloc_timeout is adjusted and reduced to fit the ul_period.
BLE- GPS and BLE-LPGPS
A BLE scan result is considered successful if at least one beacon is detected during the scan, with a measured RSSI value greater than ble_rssi_filter value. In this case BLE position message is sent via LoRaWAN™. Otherwise, the tracker tries immediately the next geolocation technology (GPS or LPGPS), in the same geolocation cycle.
Multi technology switching state diagrams
The multi-technology state diagram is shown below: