Using Modbus protocol
The Modbus flow provided in Node-Red allows LoRaWAN sensors to expose data inside an built-in slave Modbus server. This server is available on the standard tcp port 10502.
The flow requires that all uplinks are published in the internal MQTT topic /uplink-topic.
This is the case with the default 'UPLINK / DOWNLINK' flow provided during the installation.
Modbus server configuration
In the ModBus flow, double-click the Modbus adapter node to change its settings:
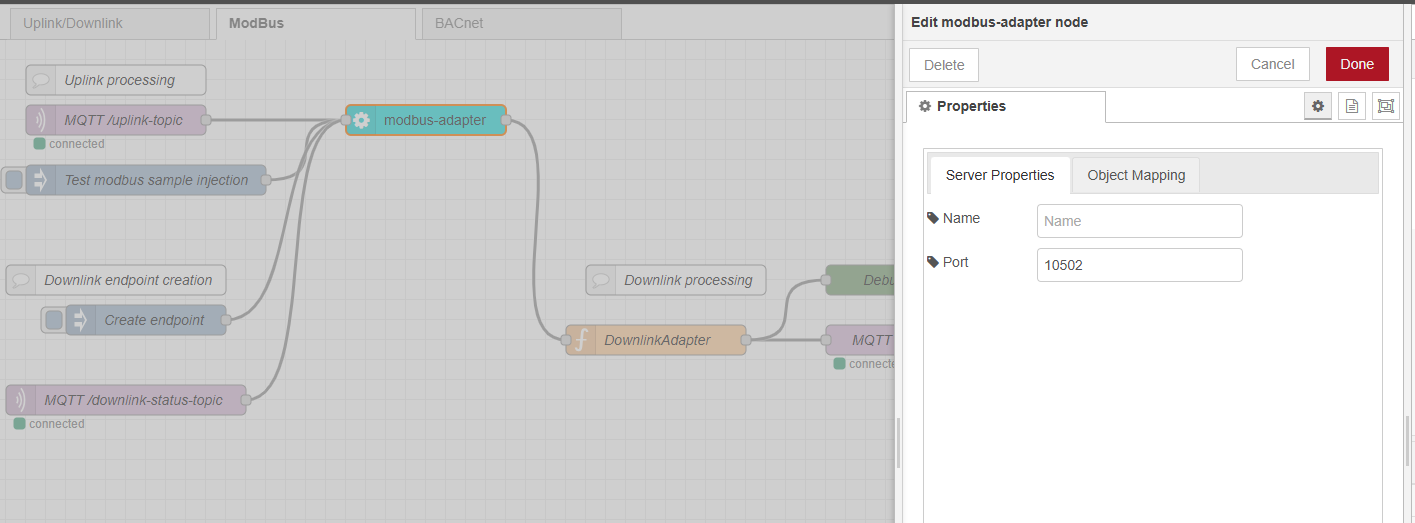
The modbus server is configured to listen on TCP port 10502, you can change it to port 11502.